
目录
快速导航-
机械基础工程 | 带后掠桨尖旋翼/螺旋桨的悬停气弹特性分析
机械基础工程 | 带后掠桨尖旋翼/螺旋桨的悬停气弹特性分析
-
机械基础工程 | 聚碳酸酯超低温冷却车削表面形貌试验研究
机械基础工程 | 聚碳酸酯超低温冷却车削表面形貌试验研究
-
机械基础工程 | 碳化钨粉末表面涂层改性金刚石粉末的涂层工艺及机理
机械基础工程 | 碳化钨粉末表面涂层改性金刚石粉末的涂层工艺及机理
-
机械基础工程 | 基于S变换双阈值法的汽车零部件载荷谱加速编辑
机械基础工程 | 基于S变换双阈值法的汽车零部件载荷谱加速编辑
-
机械基础工程 | 喷油润滑聚醚醚酮的接触疲劳性能
机械基础工程 | 喷油润滑聚醚醚酮的接触疲劳性能
-
机械基础工程 | 水压泵柱塞密封性能实验装置的设计
机械基础工程 | 水压泵柱塞密封性能实验装置的设计
-
机械基础工程 | 单向陶瓷基复合材料C/SiC变角度顺逆磨的对比试验
机械基础工程 | 单向陶瓷基复合材料C/SiC变角度顺逆磨的对比试验
-
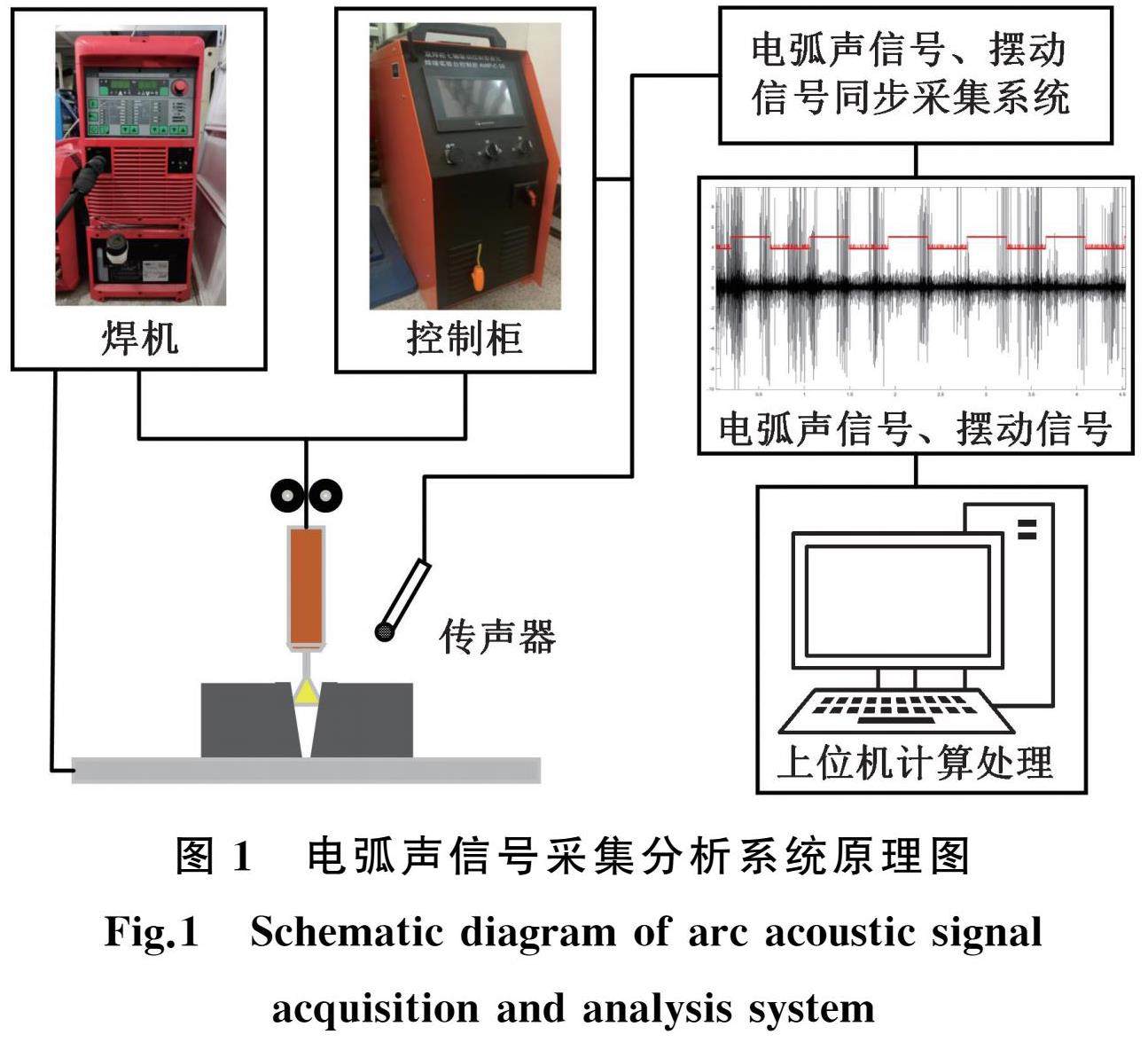
机械基础工程 | 基于电弧声信号的窄间隙脉冲熔化极气体保护焊侧壁熔合状态在线识别
机械基础工程 | 基于电弧声信号的窄间隙脉冲熔化极气体保护焊侧壁熔合状态在线识别
-
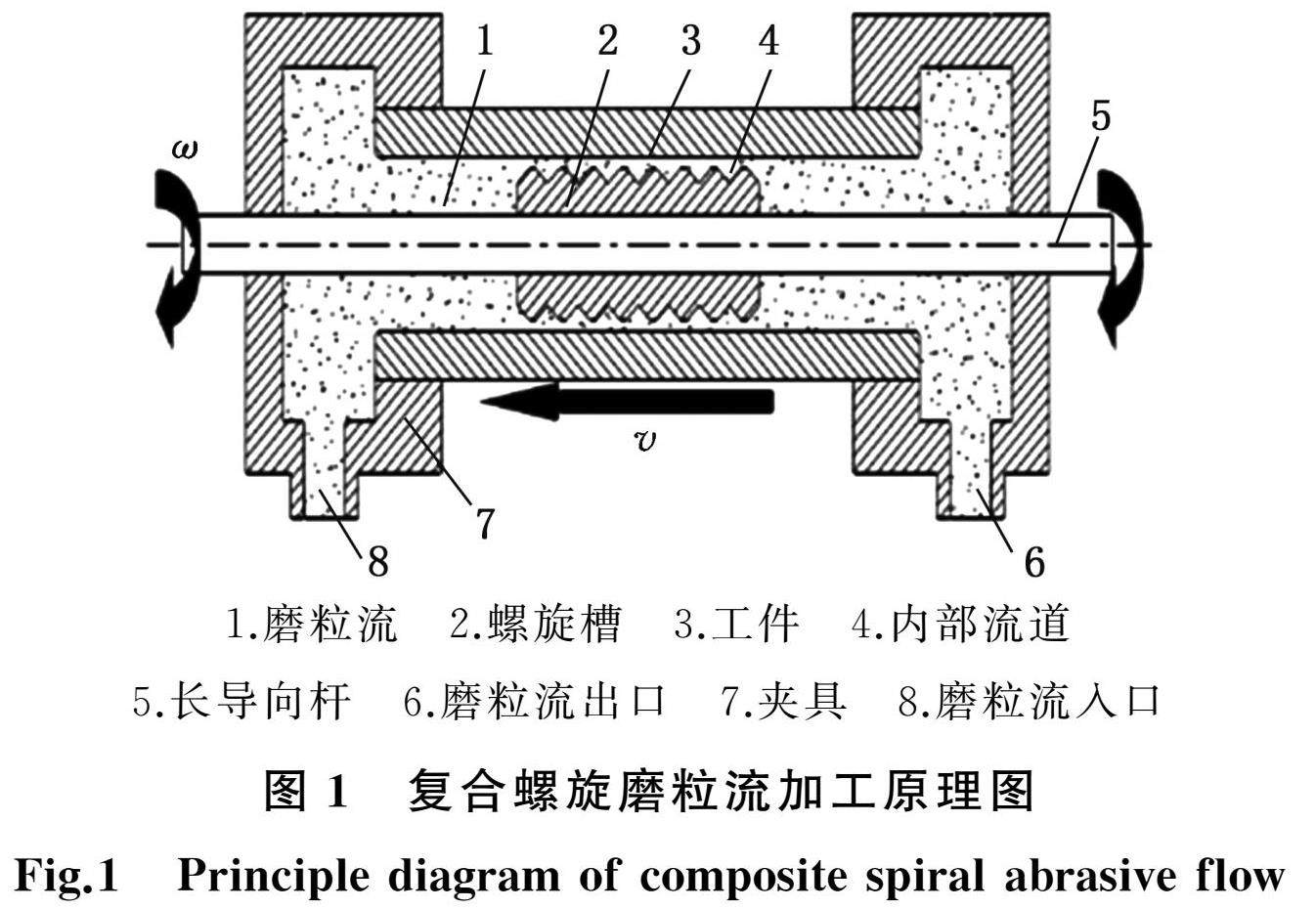
机械基础工程 | 复合螺旋磨粒流流场特性的研究
机械基础工程 | 复合螺旋磨粒流流场特性的研究
-
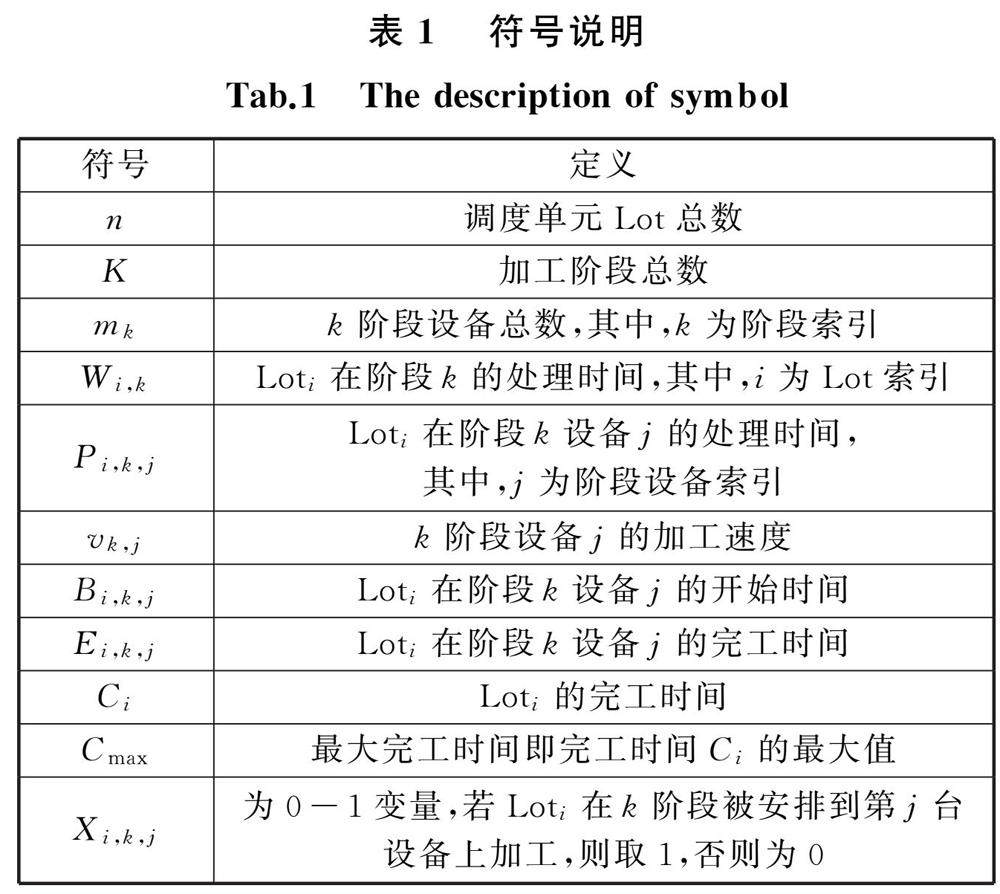
智能制造 | 基于孪生人工蜂鸟算法的多作业模式半导体封测环节调度
智能制造 | 基于孪生人工蜂鸟算法的多作业模式半导体封测环节调度
-
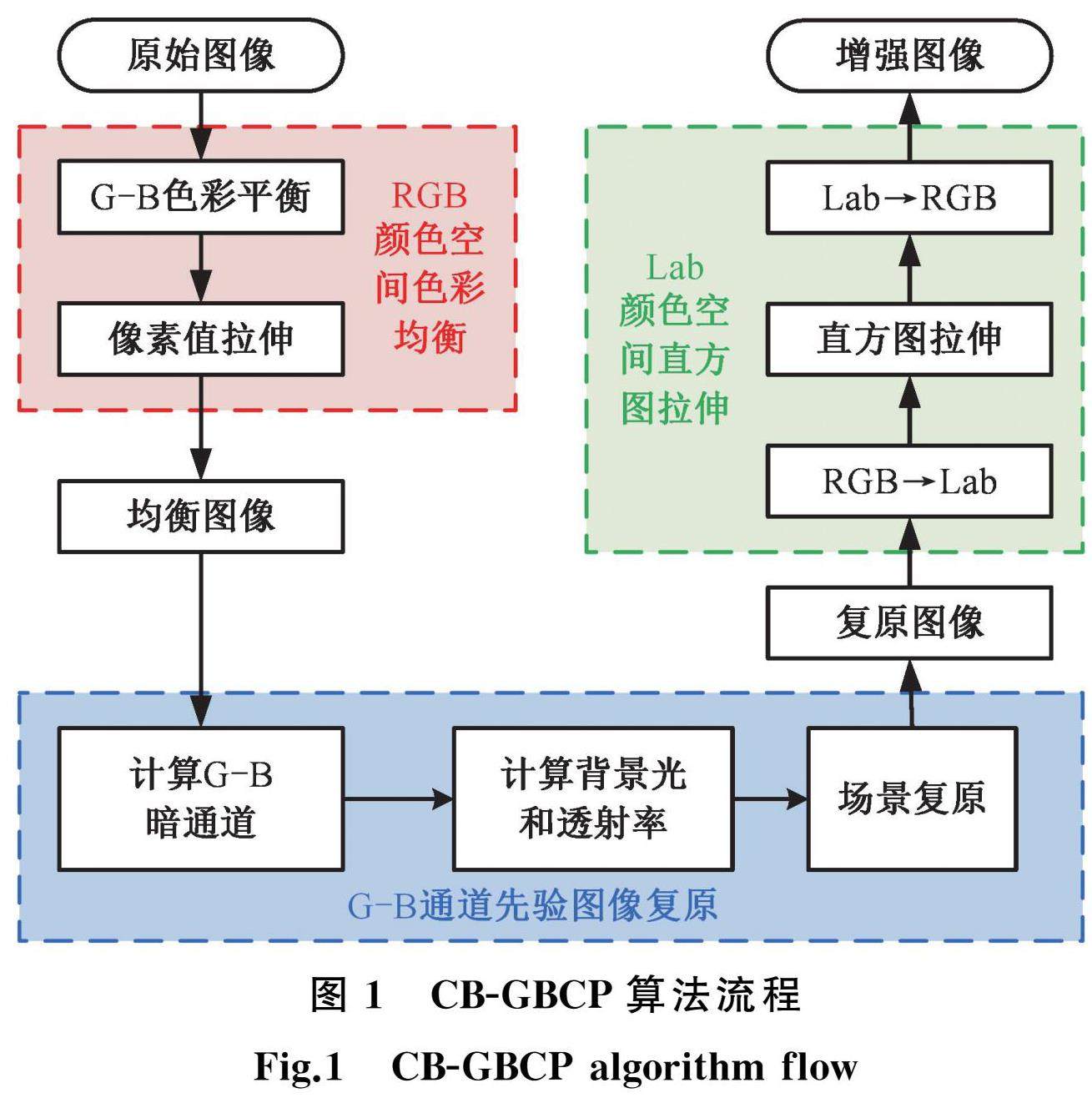
智能制造 | 基于视觉同时定位与地图构建的水下图像增强式视觉三维重建方法
智能制造 | 基于视觉同时定位与地图构建的水下图像增强式视觉三维重建方法
-
智能制造 | 一种考虑关节跃度约束的实时刀具路径光顺算法
智能制造 | 一种考虑关节跃度约束的实时刀具路径光顺算法
-
智能制造 | 面向微小软排线装配的阵列触觉状态感知技术
智能制造 | 面向微小软排线装配的阵列触觉状态感知技术
-
智能制造 | 基于改进量子粒子群优化算法的机器人逆运动学求解
智能制造 | 基于改进量子粒子群优化算法的机器人逆运动学求解
-
智能制造 | 一种多指标综合最优的抗冲击轨迹规划方法
智能制造 | 一种多指标综合最优的抗冲击轨迹规划方法
-
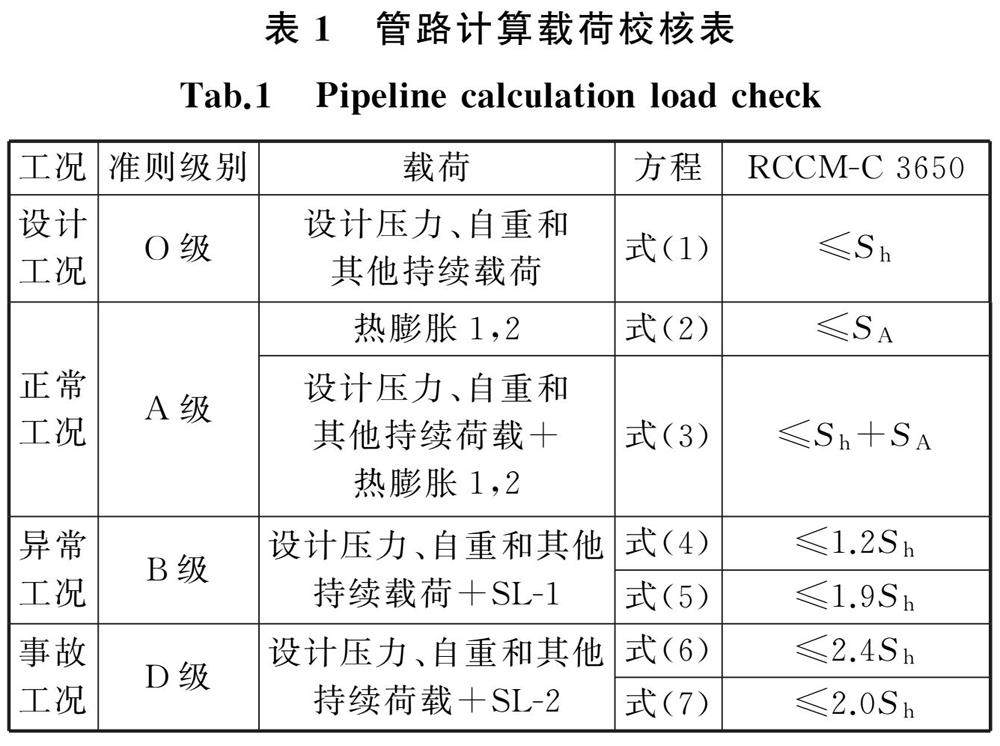
智能制造 | 复杂载荷下的核管路支架智能布置
智能制造 | 复杂载荷下的核管路支架智能布置
-

智能制造 | 狭长空间内重载调姿装配机器人的设计与研究
智能制造 | 狭长空间内重载调姿装配机器人的设计与研究
-
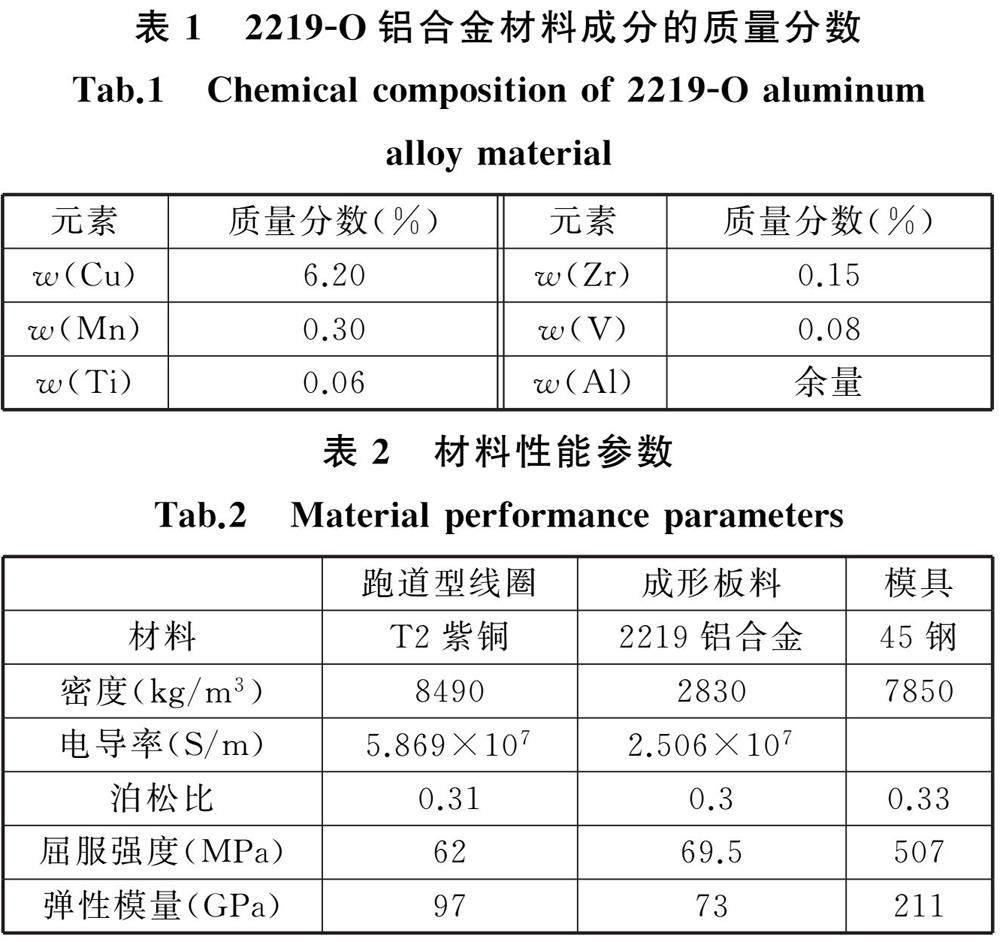
先进材料加工工程 | 跑道型线圈板料电磁成形磁场分布的调控
先进材料加工工程 | 跑道型线圈板料电磁成形磁场分布的调控
-

先进材料加工工程 | 1180 MPa级超高强钢冷连轧过程的厚度综合控制技术
先进材料加工工程 | 1180 MPa级超高强钢冷连轧过程的厚度综合控制技术
-

工程前沿 | 驱动系统效率最优的并联混合动力商用车模式切换及换挡控制策略
工程前沿 | 驱动系统效率最优的并联混合动力商用车模式切换及换挡控制策略
-
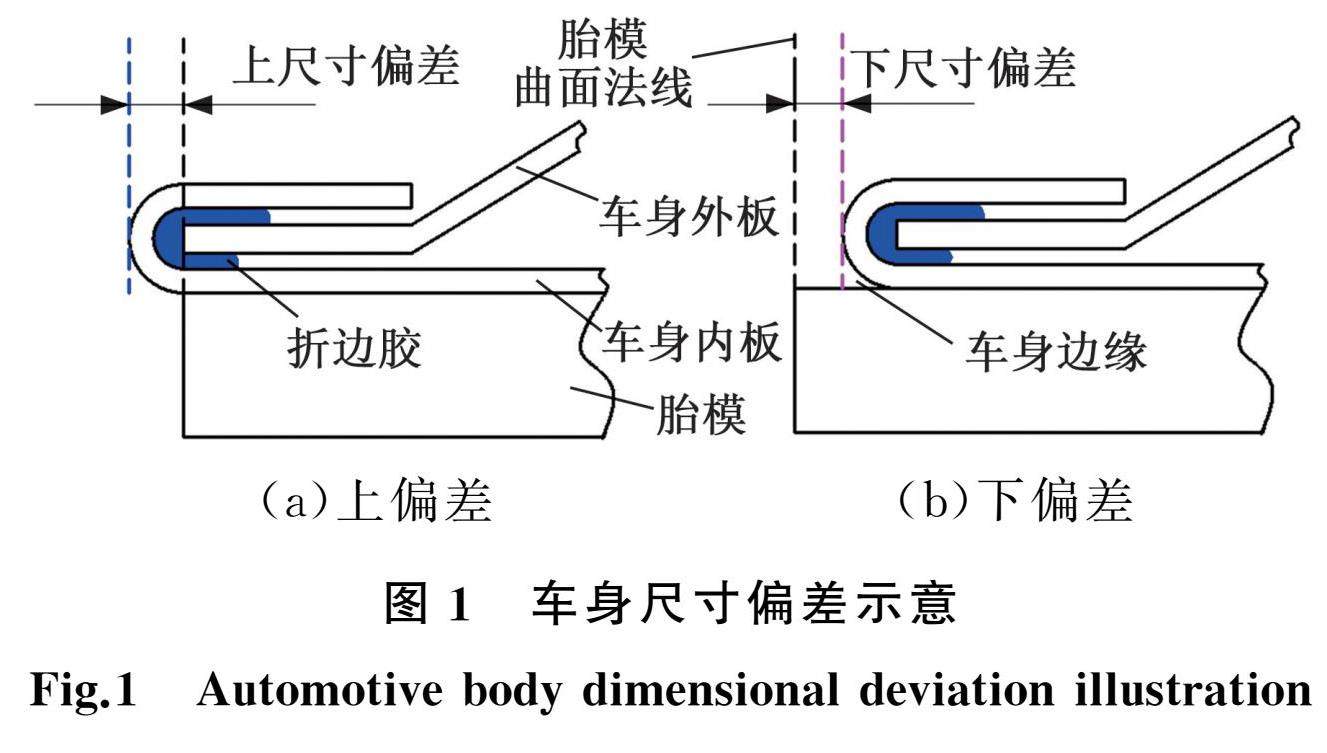
工程前沿 | 尺寸偏差下的车身含胶滚边滚轮的位姿补偿
工程前沿 | 尺寸偏差下的车身含胶滚边滚轮的位姿补偿
-
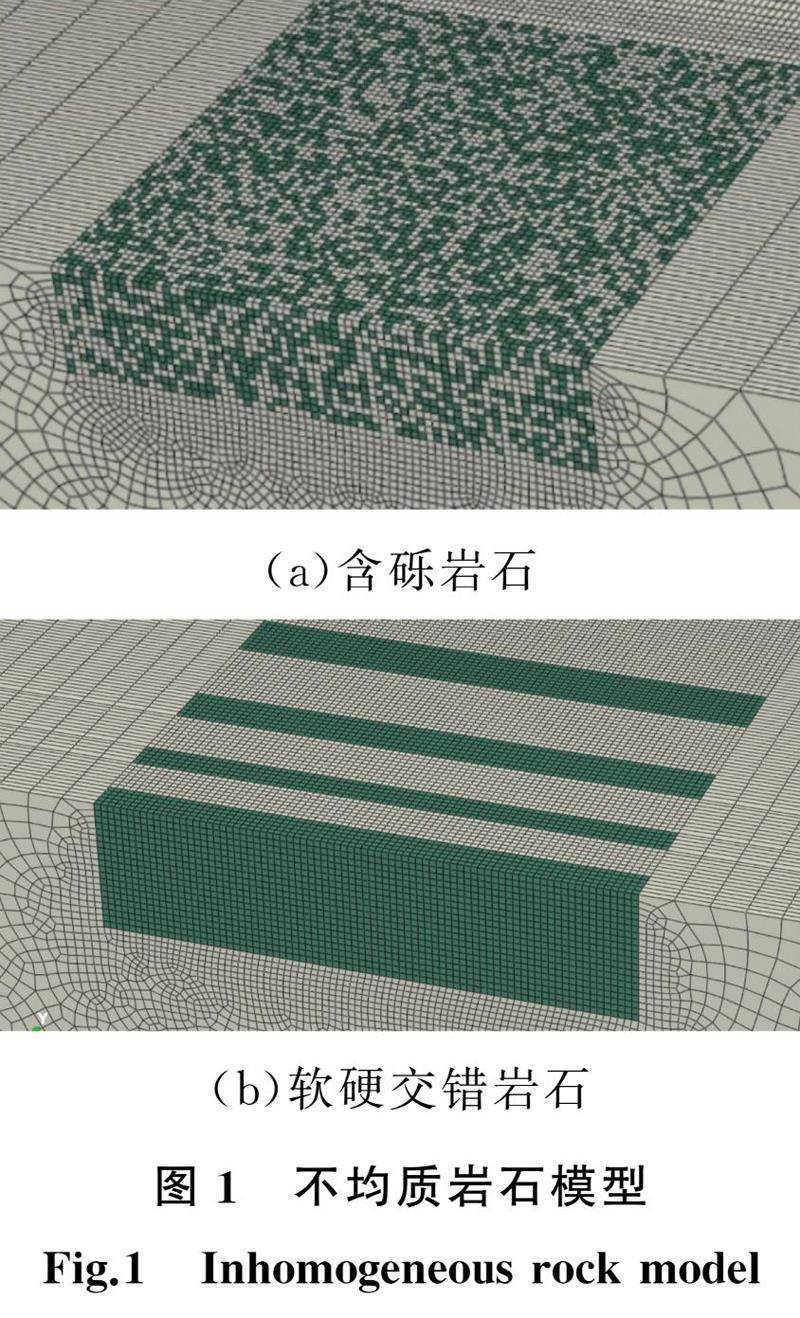
工程前沿 | 凸棱非平面聚晶金刚石齿的破岩机理及在含砾 地层中的应用
工程前沿 | 凸棱非平面聚晶金刚石齿的破岩机理及在含砾 地层中的应用














 登录
登录