

目录
快速导航-
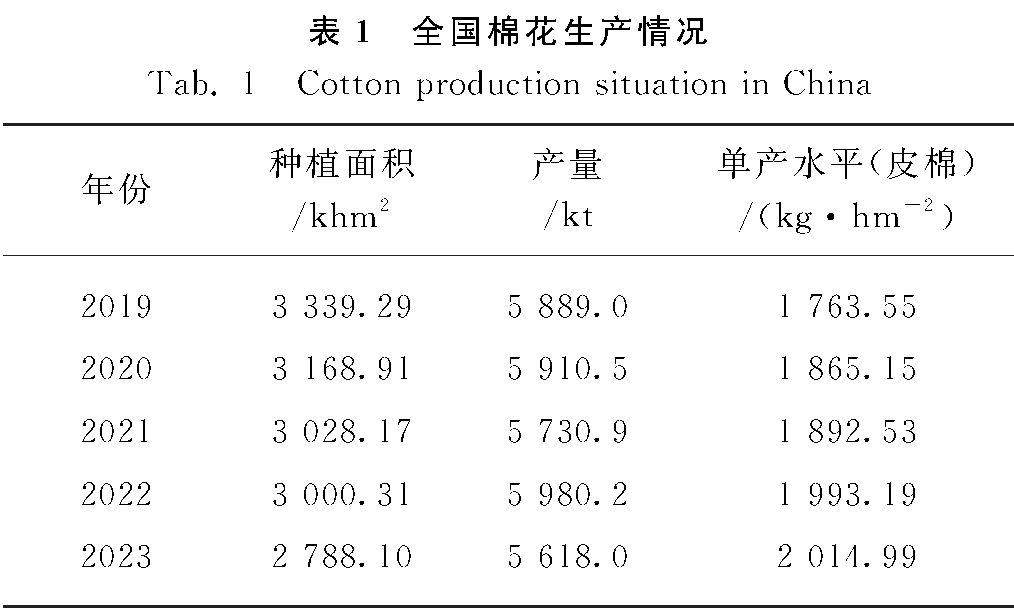
| 我国经济作物产业发展现状与机械化趋势分析
| 我国经济作物产业发展现状与机械化趋势分析
-
农业装备工程 | 基于改进实数遗传算法的桑叶采摘机结构参数优化
农业装备工程 | 基于改进实数遗传算法的桑叶采摘机结构参数优化
-

农业装备工程 | 牵引式油莎豆收获机设计与试验
农业装备工程 | 牵引式油莎豆收获机设计与试验
-

农业装备工程 | 丘陵山区小型玉米收获机单行去穗机构设计与试验
农业装备工程 | 丘陵山区小型玉米收获机单行去穗机构设计与试验
-

农业装备工程 | 基于EDEM-ADAMS的甘薯水平移栽机构优化设计
农业装备工程 | 基于EDEM-ADAMS的甘薯水平移栽机构优化设计
-

农业装备工程 | 导轨拉拔式红花采收装置设计与试验
农业装备工程 | 导轨拉拔式红花采收装置设计与试验
-

农业装备工程 | 等滑切角锯齿型刀片优化设计与试验
农业装备工程 | 等滑切角锯齿型刀片优化设计与试验
-

农业装备工程 | 我国蔬菜精量直播装备技术现状与发展趋势
农业装备工程 | 我国蔬菜精量直播装备技术现状与发展趋势
-

农业装备工程 | 农业机械耕作部件磨损性能试验研究现状
农业装备工程 | 农业机械耕作部件磨损性能试验研究现状
-

设施农业与植保机械工程 | 基于3C认证的自走式喷杆喷雾机产品现状与展望
设施农业与植保机械工程 | 基于3C认证的自走式喷杆喷雾机产品现状与展望
-

设施农业与植保机械工程 | 我国葡萄植保机械化技术发展现状与对策
设施农业与植保机械工程 | 我国葡萄植保机械化技术发展现状与对策
-

设施农业与植保机械工程 | 苹果园开沟施肥机排肥装置设计与试验
设施农业与植保机械工程 | 苹果园开沟施肥机排肥装置设计与试验
-

设施农业与植保机械工程 | 9NTB型双向摆动旋转式牛体刷研制
设施农业与植保机械工程 | 9NTB型双向摆动旋转式牛体刷研制
-

设施农业与植保机械工程 | 基于CFD的果园喷雾风筒装置流体分析与试验
设施农业与植保机械工程 | 基于CFD的果园喷雾风筒装置流体分析与试验
-

设施农业与植保机械工程 | 蓝莓挑振复合采摘技术装置设计与试验
设施农业与植保机械工程 | 蓝莓挑振复合采摘技术装置设计与试验
-

农产品加工工程 | 鲜食玉米收获机高净度清选智能测产装置研究
农产品加工工程 | 鲜食玉米收获机高净度清选智能测产装置研究
-

农产品加工工程 | 生姜植株提拉力学特性的试验研究
农产品加工工程 | 生姜植株提拉力学特性的试验研究
-

农产品加工工程 | 基于响应面法的缢蛏壳肉分离装置工艺参数研究
农产品加工工程 | 基于响应面法的缢蛏壳肉分离装置工艺参数研究
-

车辆与动力工程 | 特性参数连续可变复合传动的优化与选型
车辆与动力工程 | 特性参数连续可变复合传动的优化与选型
-

车辆与动力工程 | 拖拉机液压功率分流无级变速箱设计
车辆与动力工程 | 拖拉机液压功率分流无级变速箱设计
-

车辆与动力工程 | 基于DEM-MBD耦合的履带式全地形车辆爬坡特性研究
车辆与动力工程 | 基于DEM-MBD耦合的履带式全地形车辆爬坡特性研究
-

车辆与动力工程 | 果园作业平台关键技术研究进展
车辆与动力工程 | 果园作业平台关键技术研究进展
-
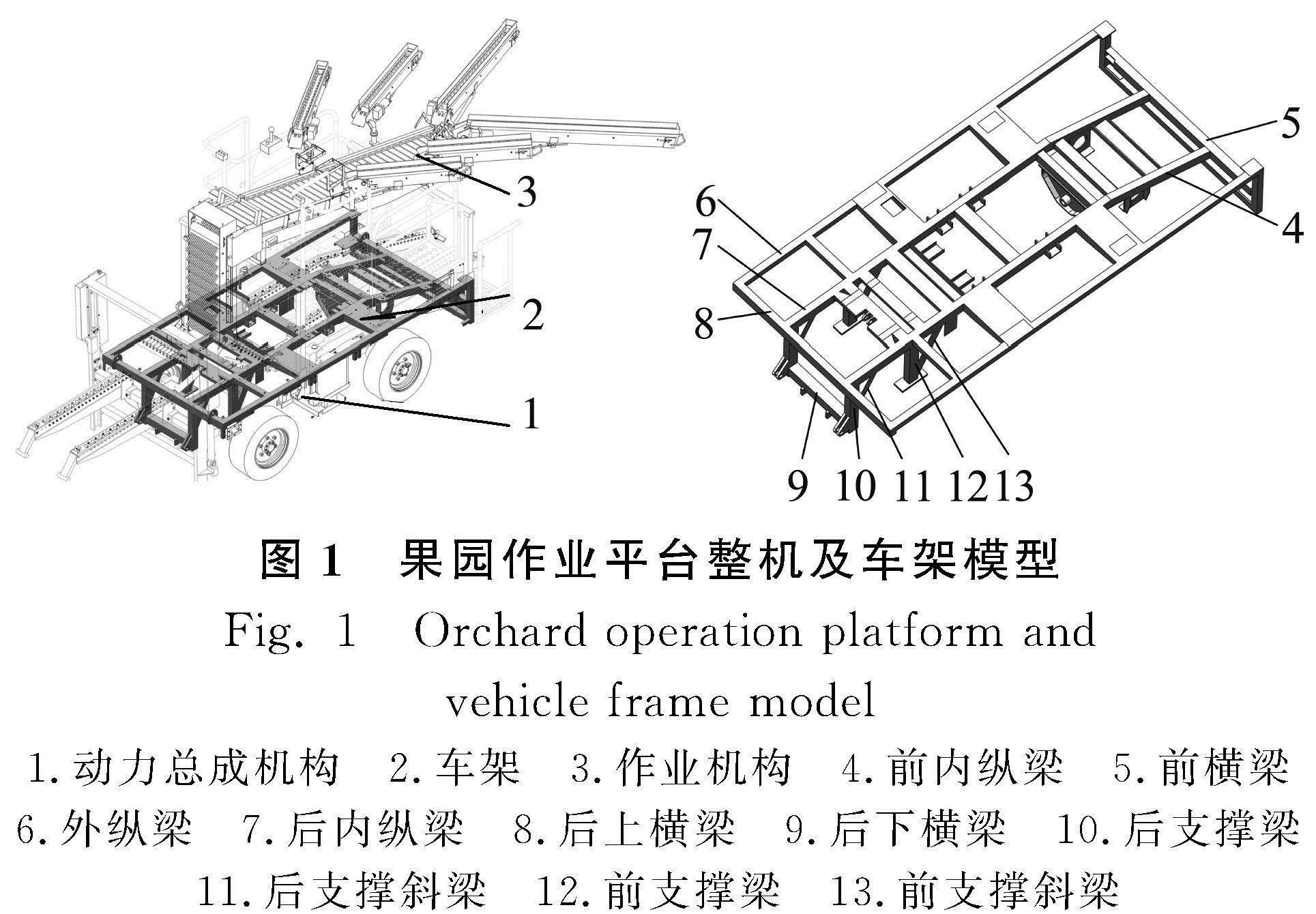
车辆与动力工程 | 果园作业平台车架耐久性研究
车辆与动力工程 | 果园作业平台车架耐久性研究
-

农业信息化工程 | 融合GA-Attention-LSTM算法的温室樱桃环境参数预测与裂果预警
农业信息化工程 | 融合GA-Attention-LSTM算法的温室樱桃环境参数预测与裂果预警
-
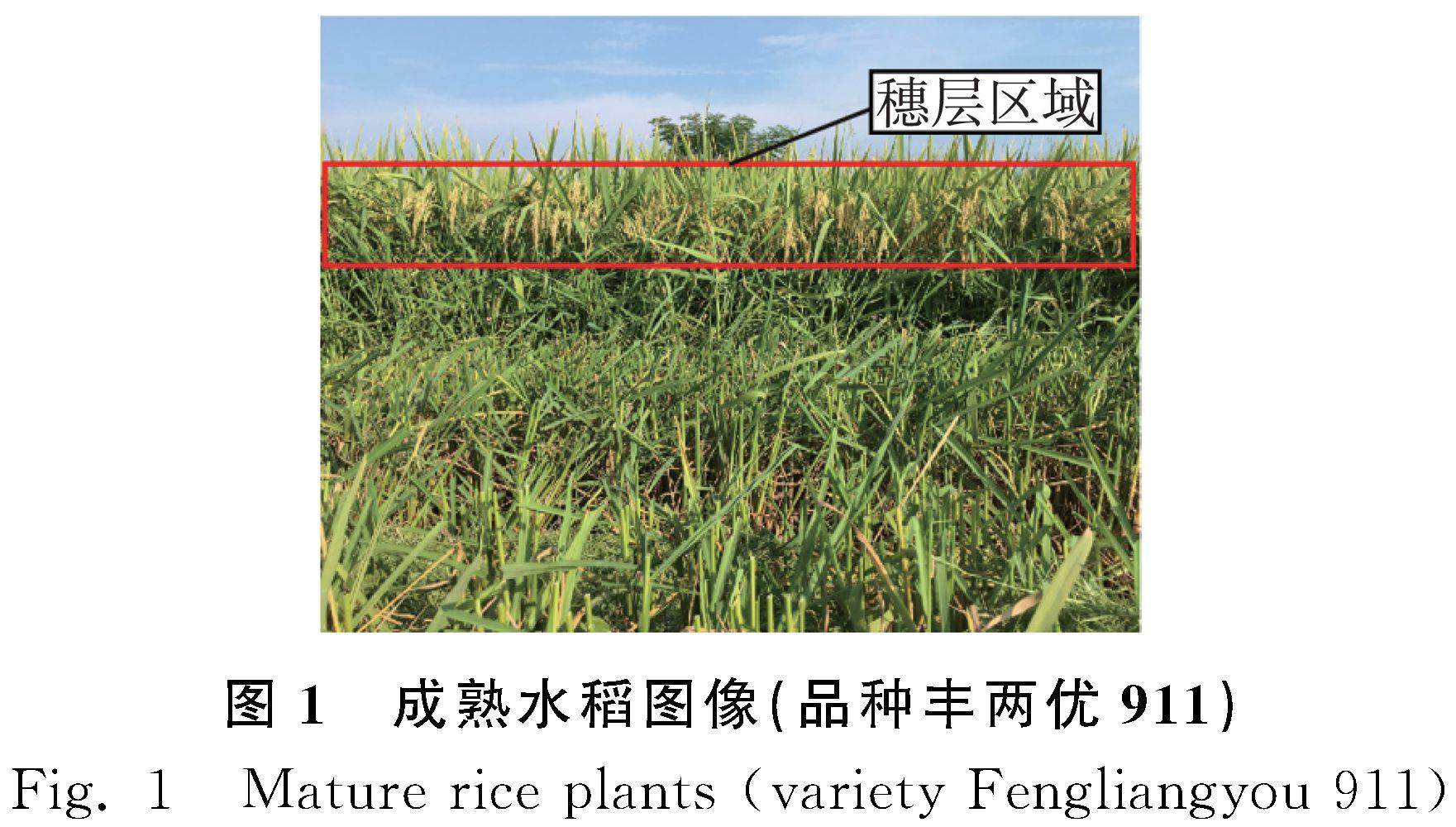
农业信息化工程 | 基于深度相机的水稻穗层高度检测研究
农业信息化工程 | 基于深度相机的水稻穗层高度检测研究
-

农业信息化工程 | 基于数字孪生技术的奶牛场养殖监控平台设计
农业信息化工程 | 基于数字孪生技术的奶牛场养殖监控平台设计
-

农业信息化工程 | 面向畜禽舍温度监测数据融合算法改进研究
农业信息化工程 | 面向畜禽舍温度监测数据融合算法改进研究
-

农业信息化工程 | 基于注意力网络的长时牦牛个体识别研究
农业信息化工程 | 基于注意力网络的长时牦牛个体识别研究
-
农业信息化工程 | 基于改进Deeplabv3+模型的果树语义分割研究
农业信息化工程 | 基于改进Deeplabv3+模型的果树语义分割研究
-

农业信息化工程 | 基于区块链智能合约的有机大米追溯研究
农业信息化工程 | 基于区块链智能合约的有机大米追溯研究
-

农业生物系统与能源工程 | 新型多格室粪便堆肥反应器设计与试验
农业生物系统与能源工程 | 新型多格室粪便堆肥反应器设计与试验
-

农业生物系统与能源工程 | 基于离散元法的潮湿甘蔗复合肥参数标定
农业生物系统与能源工程 | 基于离散元法的潮湿甘蔗复合肥参数标定
-

农业生物系统与能源工程 | 双热交换器预冷装备研制及试验
农业生物系统与能源工程 | 双热交换器预冷装备研制及试验
-

农业智能化研究 | 基于改进YOLOv5s-ECA-ASFF算法的茶叶病害目标检测
农业智能化研究 | 基于改进YOLOv5s-ECA-ASFF算法的茶叶病害目标检测
-

农业智能化研究 | 基于改进Swin-Transformer的柑橘病叶分类模型
农业智能化研究 | 基于改进Swin-Transformer的柑橘病叶分类模型
-

农业智能化研究 | 电动遥控茶园管理机设计与试验
农业智能化研究 | 电动遥控茶园管理机设计与试验
-

农业智能化研究 | 融合残差网络与注意力机制的草莓检测
农业智能化研究 | 融合残差网络与注意力机制的草莓检测
-

农业智能化研究 | 基于改进YOLOv5l的设施番茄3D信息检测方法
农业智能化研究 | 基于改进YOLOv5l的设施番茄3D信息检测方法
-

农业智能化研究 | 圣女果温室巡检机器人系统设计与试验
农业智能化研究 | 圣女果温室巡检机器人系统设计与试验
-

农业智能化研究 | 基于PCA-LDA-SVM算法的茶小绿叶蝉识别
农业智能化研究 | 基于PCA-LDA-SVM算法的茶小绿叶蝉识别
-

农业机械化综合研究 | 苹果机械化采收发展历程、模式及其技术现状
农业机械化综合研究 | 苹果机械化采收发展历程、模式及其技术现状
-

农业机械化综合研究 | “卡脖子”农业技术的创新资源配置模式研究
农业机械化综合研究 | “卡脖子”农业技术的创新资源配置模式研究
-

农业机械化综合研究 | 基于农产品进出口贸易视角的农业机械化发展研究
农业机械化综合研究 | 基于农产品进出口贸易视角的农业机械化发展研究
-

农业机械化综合研究 | 甘蓝收获技术与装备研究现状及发展趋势
农业机械化综合研究 | 甘蓝收获技术与装备研究现状及发展趋势
-

农业机械化综合研究 | 整秆式收获打捆装备研究现状与发展趋势
农业机械化综合研究 | 整秆式收获打捆装备研究现状与发展趋势











 登录
登录