

目录
快速导航-

| 油菜联合机收与分段机收作业效果综合测评
| 油菜联合机收与分段机收作业效果综合测评
-

农业装备工程 | 大豆玉米带状种植模式下玉米摘穗机设计与试验
农业装备工程 | 大豆玉米带状种植模式下玉米摘穗机设计与试验
-

农业装备工程 | 基于离散元的棉田仿生减阻犁体设计与试验
农业装备工程 | 基于离散元的棉田仿生减阻犁体设计与试验
-
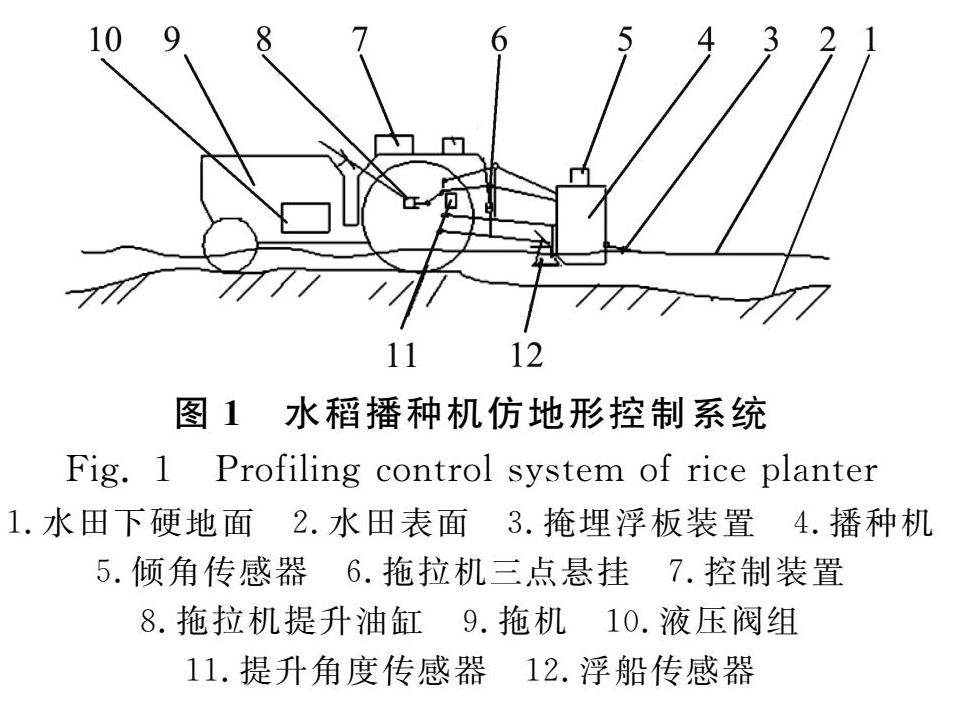
农业装备工程 | 宽幅水稻播种机精确埋深控制系统设计与试验
农业装备工程 | 宽幅水稻播种机精确埋深控制系统设计与试验
-

农业装备工程 | 小麦机械化匀播控制系统设计与试验
农业装备工程 | 小麦机械化匀播控制系统设计与试验
-

农业装备工程 | 面向多播行协同作业的精量播种监测系统研究
农业装备工程 | 面向多播行协同作业的精量播种监测系统研究
-

农业装备工程 | 基于DEM的导种管优化设计方法研究
农业装备工程 | 基于DEM的导种管优化设计方法研究
-

农业装备工程 | 基于EDEM的高速穴播器排种性能仿真分析与试验
农业装备工程 | 基于EDEM的高速穴播器排种性能仿真分析与试验
-

设施农业与植保机械工程 | 扎穴施肥单体仿真分析与试验
设施农业与植保机械工程 | 扎穴施肥单体仿真分析与试验
-
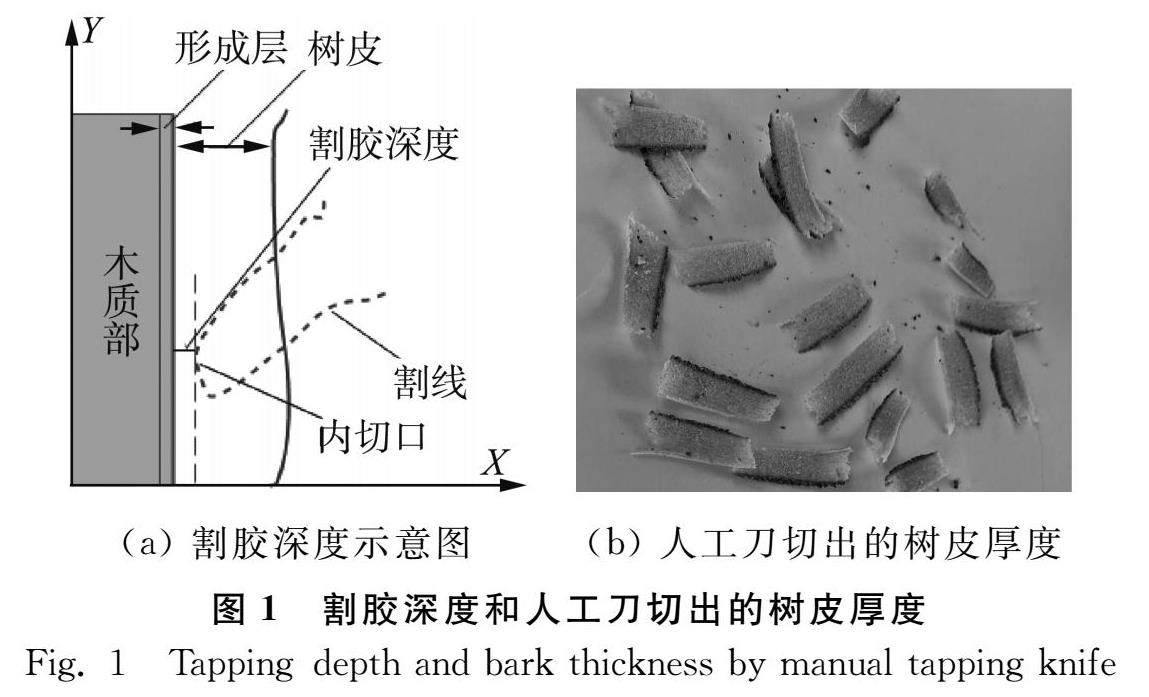
设施农业与植保机械工程 | 机械割胶装备切割仿形机构设计与试验
设施农业与植保机械工程 | 机械割胶装备切割仿形机构设计与试验
-

设施农业与植保机械工程 | 槽轮式黄芪移栽机关键部件设计与试验
设施农业与植保机械工程 | 槽轮式黄芪移栽机关键部件设计与试验
-

设施农业与植保机械工程 | 韭菜收获机圆盘切割装置设计与试验
设施农业与植保机械工程 | 韭菜收获机圆盘切割装置设计与试验
-
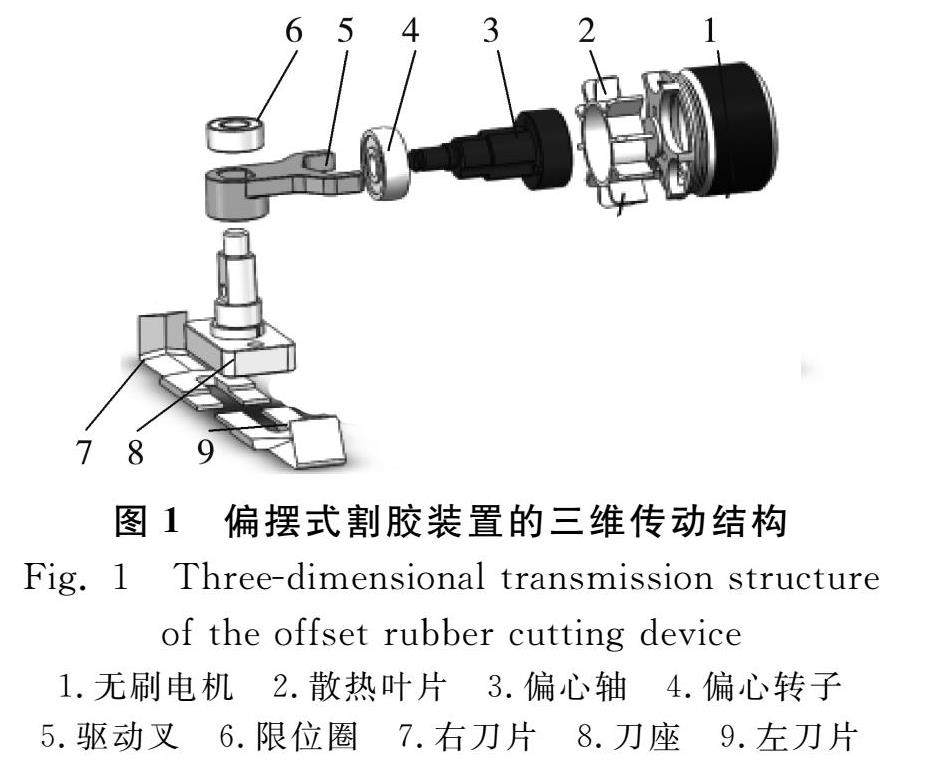
设施农业与植保机械工程 | 电驱动偏摆式天然橡胶割胶装置设计及运动特性分析
设施农业与植保机械工程 | 电驱动偏摆式天然橡胶割胶装置设计及运动特性分析
-

设施农业与植保机械工程 | 基于文献计量学的施肥机械领域研究进展
设施农业与植保机械工程 | 基于文献计量学的施肥机械领域研究进展
-

设施农业与植保机械工程 | 草莓移栽机控制系统设计与试验
设施农业与植保机械工程 | 草莓移栽机控制系统设计与试验
-
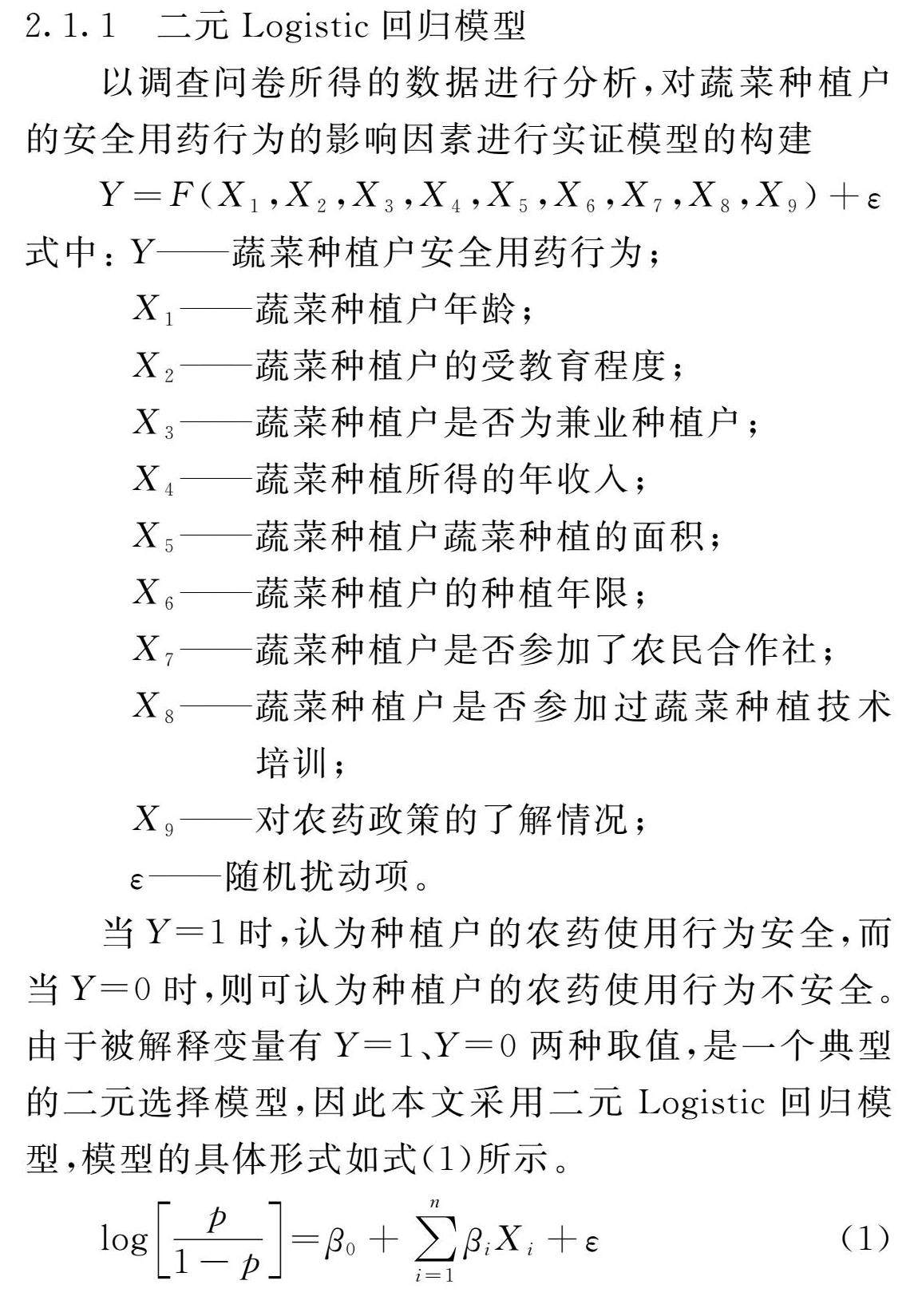
设施农业与植保机械工程 | 蔬菜种植户安全用药行为及影响因素研究
设施农业与植保机械工程 | 蔬菜种植户安全用药行为及影响因素研究
-
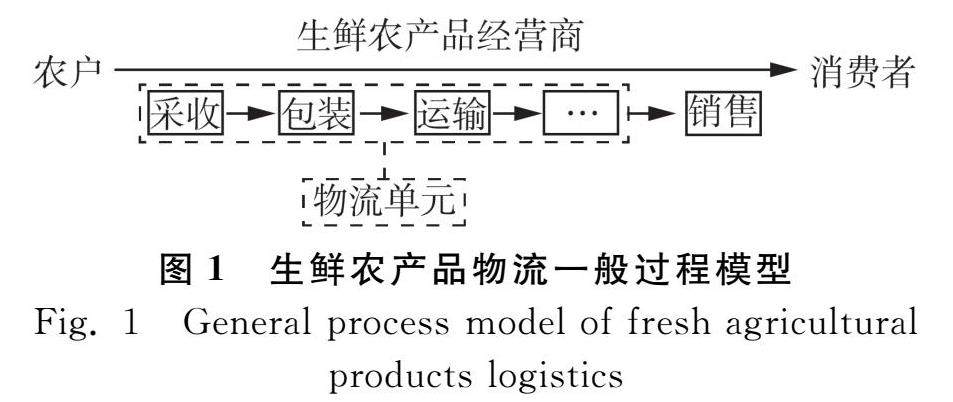
农产品加工工程 | 生鲜农产品冷链物流过程优化研究
农产品加工工程 | 生鲜农产品冷链物流过程优化研究
-

农产品加工工程 | 锤片式粉碎机工作参数优化试验研究
农产品加工工程 | 锤片式粉碎机工作参数优化试验研究
-

农产品加工工程 | 带式烘干机风速场均匀性试验研究
农产品加工工程 | 带式烘干机风速场均匀性试验研究
-

农产品加工工程 | 基于Modified Page函数和BoxBehnken响应面法的黄姜干燥参数优化
农产品加工工程 | 基于Modified Page函数和BoxBehnken响应面法的黄姜干燥参数优化
-
农产品加工工程 | 基于主动热红外成像的马铃薯与杂质分类方法
农产品加工工程 | 基于主动热红外成像的马铃薯与杂质分类方法
-

农产品加工工程 | 基于SSAKmeans聚类算法的青菜杂质图像分割
农产品加工工程 | 基于SSAKmeans聚类算法的青菜杂质图像分割
-

农产品加工工程 | 枇杷糖度无损检测及可视化研究
农产品加工工程 | 枇杷糖度无损检测及可视化研究
-

车辆与动力工程 | 农用拖拉机不同工况下排放特性
车辆与动力工程 | 农用拖拉机不同工况下排放特性
-

车辆与动力工程 | 设施农业履带电动作业平台设计与试验
车辆与动力工程 | 设施农业履带电动作业平台设计与试验
-

车辆与动力工程 | 轮式果园多功能自主导航作业平台设计
车辆与动力工程 | 轮式果园多功能自主导航作业平台设计
-

车辆与动力工程 | 基于双预瞄纯追踪算法的丘陵山区农机差分导航系统研究
车辆与动力工程 | 基于双预瞄纯追踪算法的丘陵山区农机差分导航系统研究
-

农业信息化工程 | 基于激光测距的橡胶树树干轮廓曲线自动化提取方法
农业信息化工程 | 基于激光测距的橡胶树树干轮廓曲线自动化提取方法
-

农业信息化工程 | 基于激光三维重建的种薯芽眼识别方法研究
农业信息化工程 | 基于激光三维重建的种薯芽眼识别方法研究
-

农业信息化工程 | 基于Mask RCNN模型的葡萄藤关键结构分割方法
农业信息化工程 | 基于Mask RCNN模型的葡萄藤关键结构分割方法
-

农业信息化工程 | 基于计算机视觉的小麦收获边缘导航线提取方法
农业信息化工程 | 基于计算机视觉的小麦收获边缘导航线提取方法
-
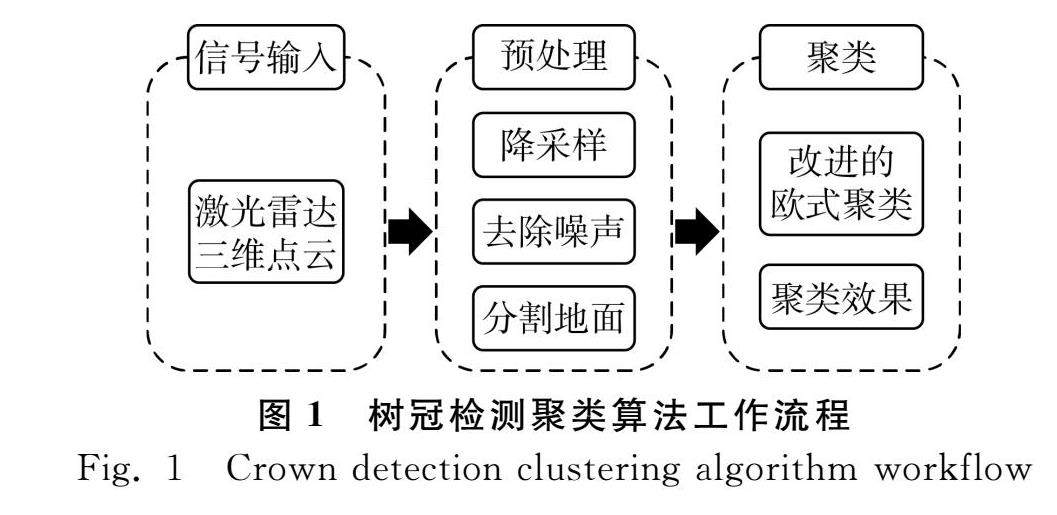
农业信息化工程 | 基于激光雷达自适应聚类半径的树冠检测研究
农业信息化工程 | 基于激光雷达自适应聚类半径的树冠检测研究
-

农业信息化工程 | 基于无人机多光谱遥感的棉花生长参数和产量估算
农业信息化工程 | 基于无人机多光谱遥感的棉花生长参数和产量估算
-

农业信息化工程 | 无人机遥感监测果树氮素含量研究进展
农业信息化工程 | 无人机遥感监测果树氮素含量研究进展
-

农业智能化研究 | 基于TRIZ理论的采茧机器人创新设计
农业智能化研究 | 基于TRIZ理论的采茧机器人创新设计
-

农业智能化研究 | 基于分层特征对齐网络的小样本马铃薯病害叶片检测
农业智能化研究 | 基于分层特征对齐网络的小样本马铃薯病害叶片检测
-

农业智能化研究 | 基于改进残差神经网络的家蚕日龄识别模型
农业智能化研究 | 基于改进残差神经网络的家蚕日龄识别模型
-
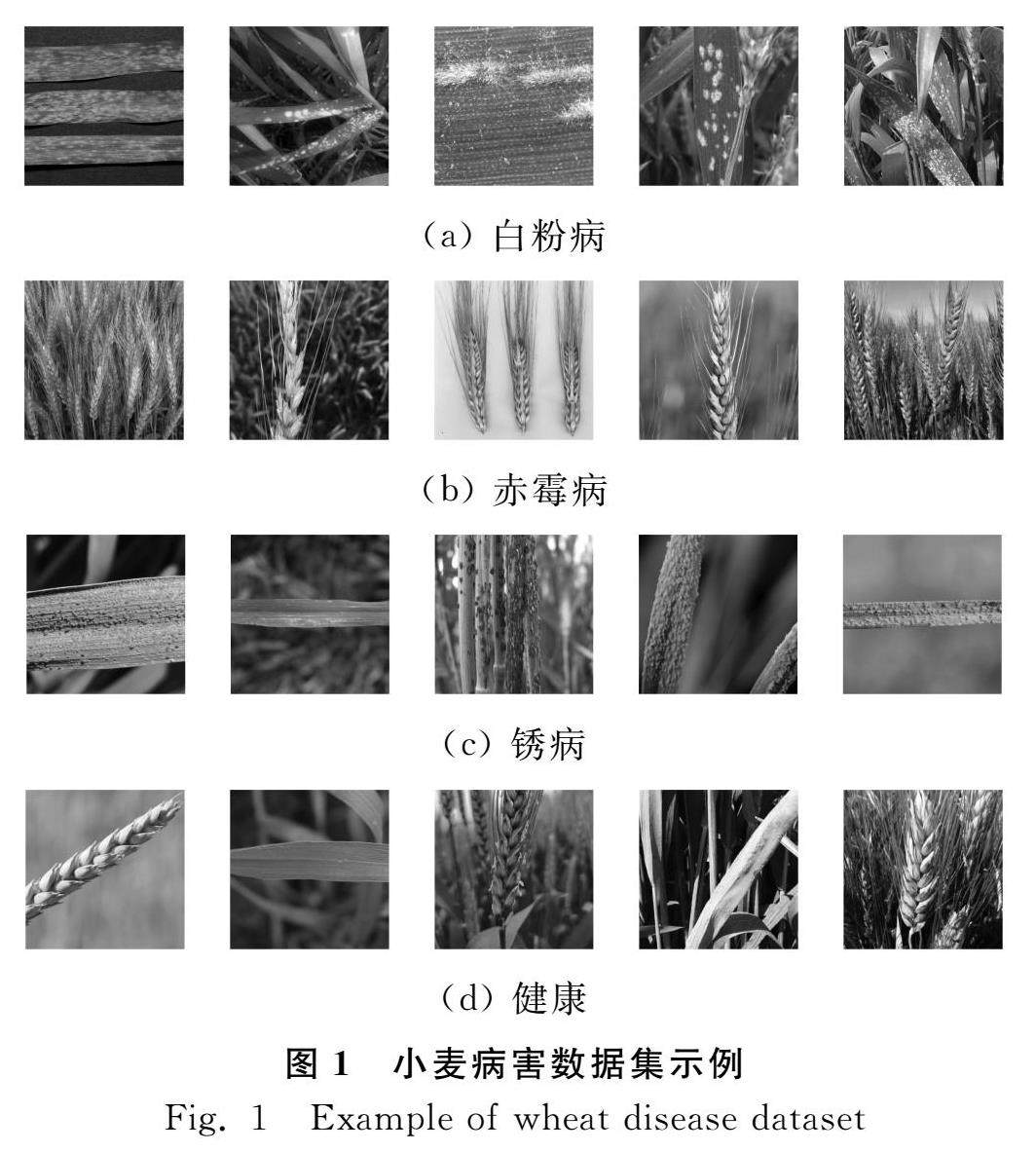
农业智能化研究 | 基于Vision Transformer的小麦病害图像识别算法
农业智能化研究 | 基于Vision Transformer的小麦病害图像识别算法
-

农业智能化研究 | 智能有机肥施肥机设计及验证
农业智能化研究 | 智能有机肥施肥机设计及验证
-

农业智能化研究 | 传统图像分割算法在农作物籽粒考种应用中的研究进展
农业智能化研究 | 传统图像分割算法在农作物籽粒考种应用中的研究进展
-
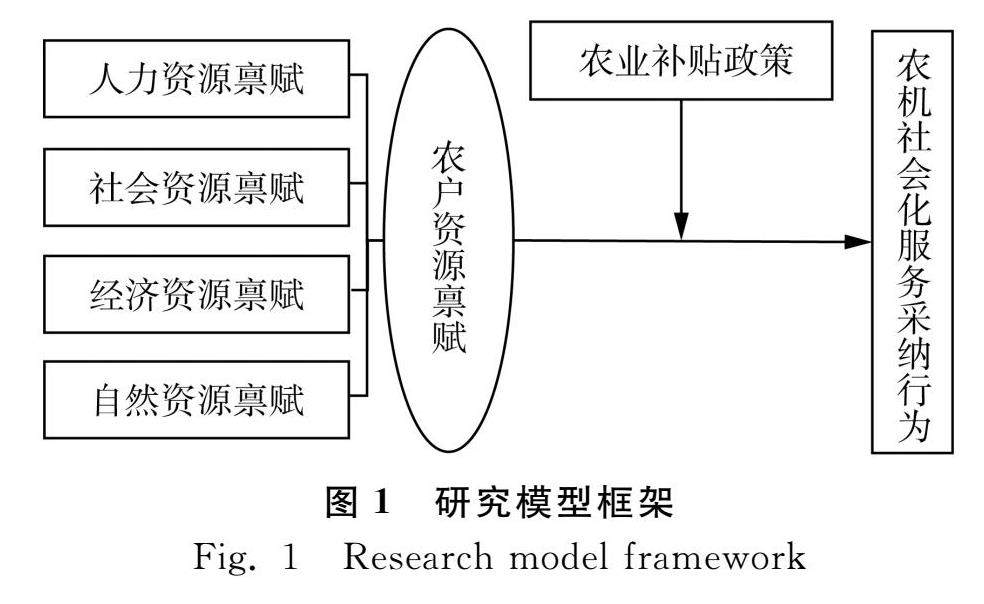
农业机械化综合研究 | 农业补贴下资源禀赋对农户农机社会化服务采纳行为的影响
农业机械化综合研究 | 农业补贴下资源禀赋对农户农机社会化服务采纳行为的影响
-

农业机械化综合研究 | 农户油菜种植意愿影响因素实证分析
农业机械化综合研究 | 农户油菜种植意愿影响因素实证分析
-

农业机械化综合研究 | 我国家庭农场的研究进展
农业机械化综合研究 | 我国家庭农场的研究进展
-

农业机械化综合研究 | 农业机械化综合发展水平地区差异及收敛特征
农业机械化综合研究 | 农业机械化综合发展水平地区差异及收敛特征
-

农业机械化综合研究 | 农机服务外包对绿色农业门槛效应研究
农业机械化综合研究 | 农机服务外包对绿色农业门槛效应研究
-

农业机械化综合研究 | 农村人口老龄化对农机社会化服务的影响
农业机械化综合研究 | 农村人口老龄化对农机社会化服务的影响











 登录
登录